Haptic feedback glove for VR
NOTE: I started making a second version of this project! You can find it here: https://www.teukkaniikka.fi/l/haptic-glove-2-0/

This picture is taken on 22.5.2018. I originally started this project 10.4.2018 and made some really big mistakes that were costing a lot of time and effort, and in the and these mistakes made me quit the project almost entirely.
What is this project all about?
So this project was originally intended to be used with Virtual Reality. The idea originally sparked from the movie Ready Player One. Imagine how cool it would be to have your hands in VR and furthermore get haptic feedback when you pick items up! I was planning to use Arduino, some sensors that I made by myself from graphite. (I just used some wires, paper, aluminium foil, the graphite from pencils and of course, tape.) To my suprise, the pressure sensors worked actually really well. I actually have some demo videos about the glove. I'll put them here below!
These are from my old Instagram account so don't bother following it!
What went wrong?
So probably the biggest mistake of them all was to use the MPU9265 that couldn't calculate the absolute orientation onboard. That means that I would've needed to do some really heavy calculations (kalman filters, etc.) onboard. If you know anything about processors, an 8-bit microcontroller without floating point unit is practically useless on these kind of calculations. I don't know why I was just trying to get those really bad sensors working, because now when I look at the project I instantly know that they are a really bad choise especially for a beginner. If I had used BNO055 instead it would've been so much easier.
But that's not all. Recently I was trying to get the project running again and ordered some BNO055 sensors from eBay, but they were counterfeit. One sensor worked sometimes and the other gave wrong values. So if you are struggling on your project, take a break and analyze the problem. Maby ask help and try to get to the root of the problem before just trying to break through it. But this mistake is one of the biggest lessons in my life. I don't know why back then I was so ignorant and though that everything should be done by yourself and asking help was no option. Sometimes that kind of situation is a really good eye opener and you should never be afraid of making mistakes and learning from them.
Documentation

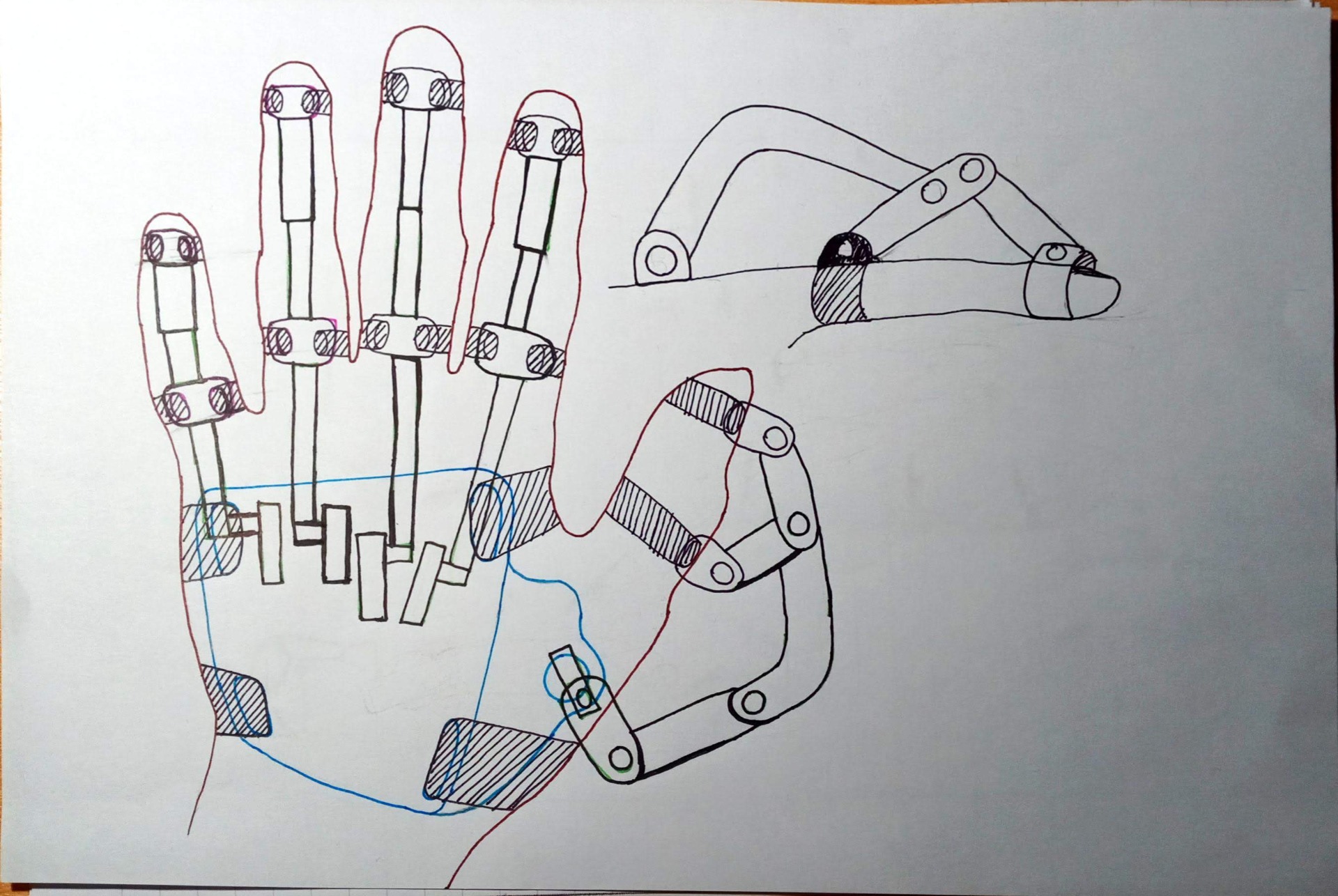
In this version the part between links 1 and 2 would hit my hand when I clenched my hand.
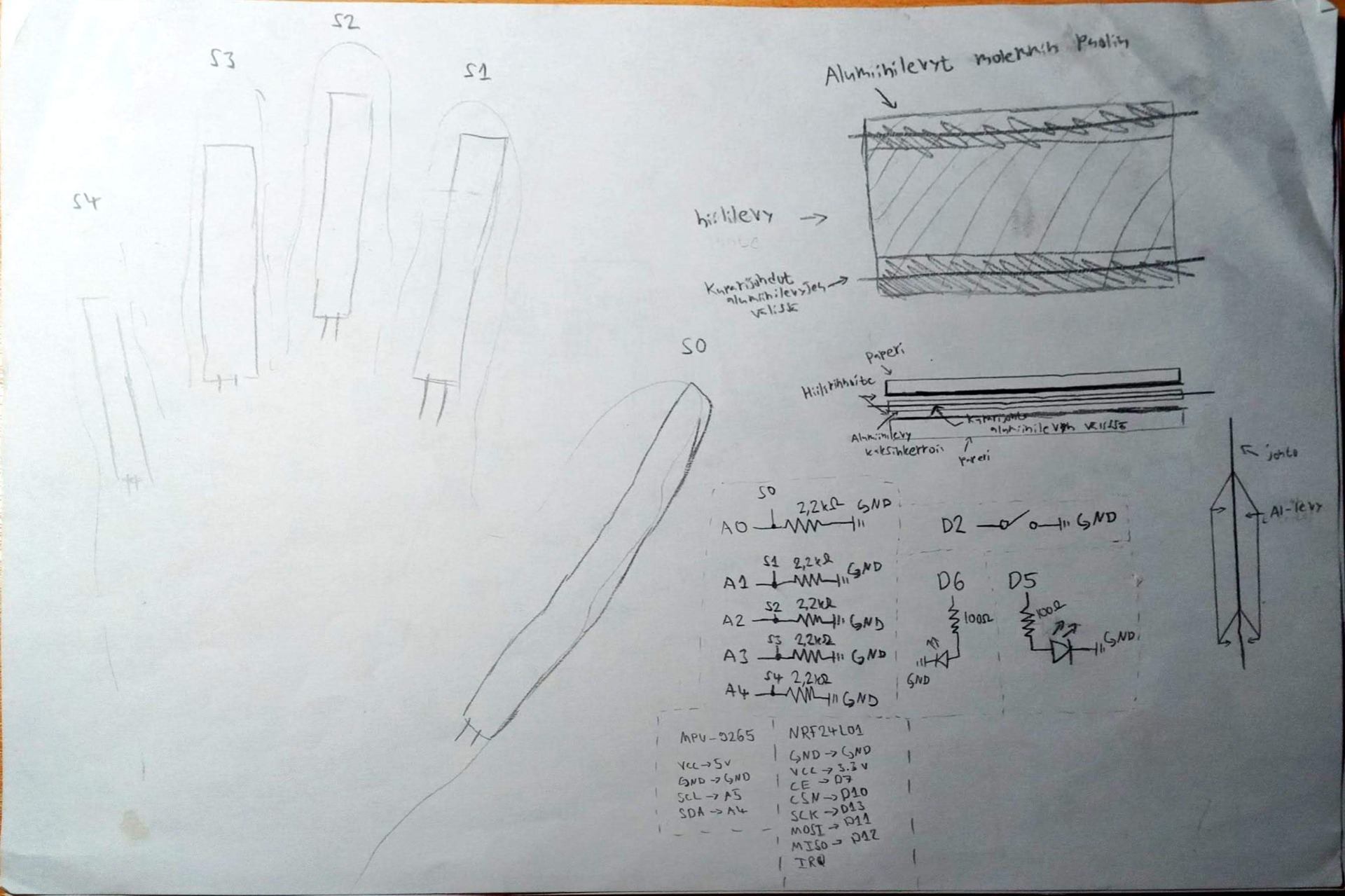
This version is the one that you can see on the video. The aluminium foil should probably be replaced with Velostat.
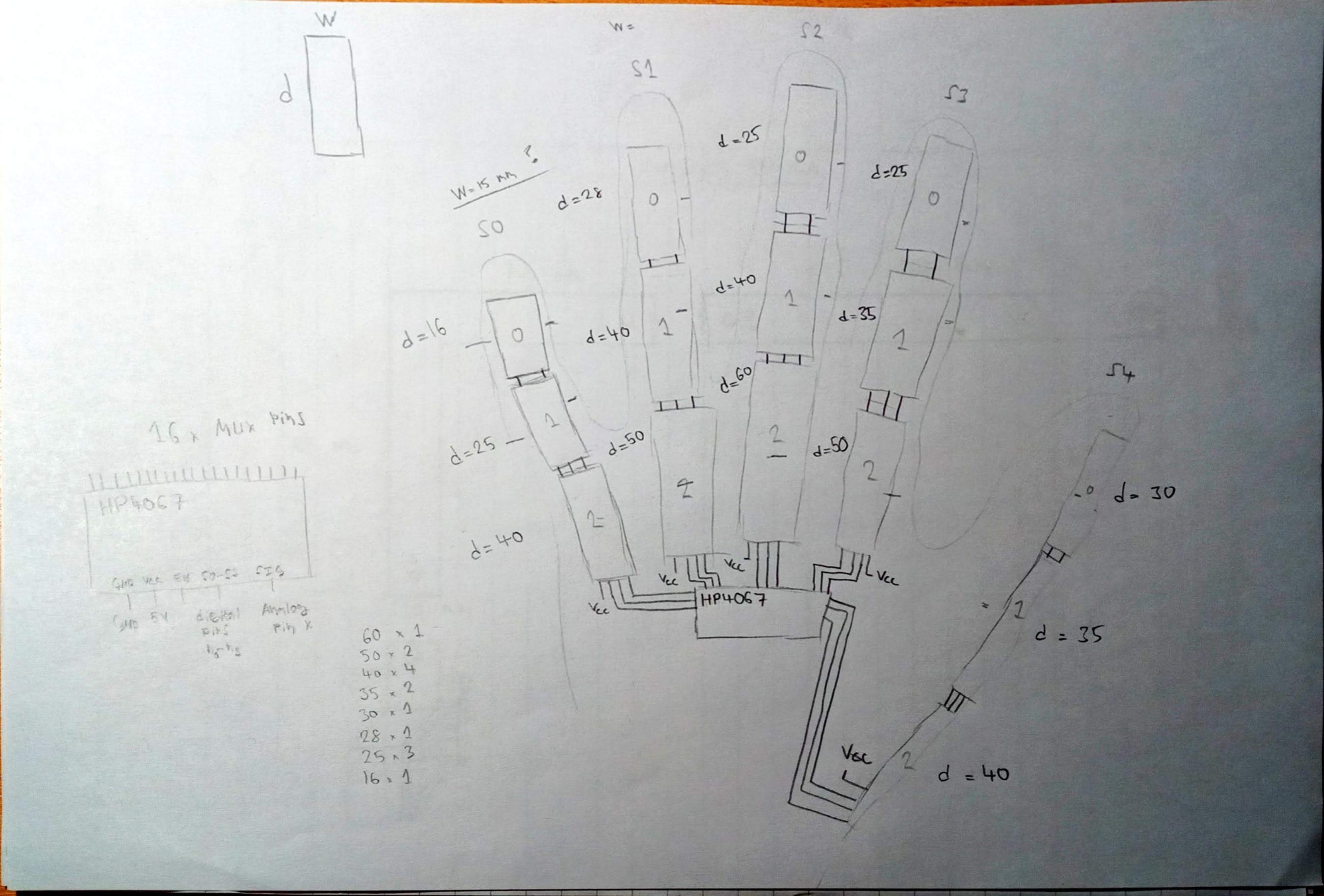
This version is actually never tested, but if it would be possible to calibrate this, it would be the best way to go for the finger tracking.
This version uses potentiometers instead of the pressure sensors. The chassis is also 3d-printed and not made of cardboard anymore.
The future of this project
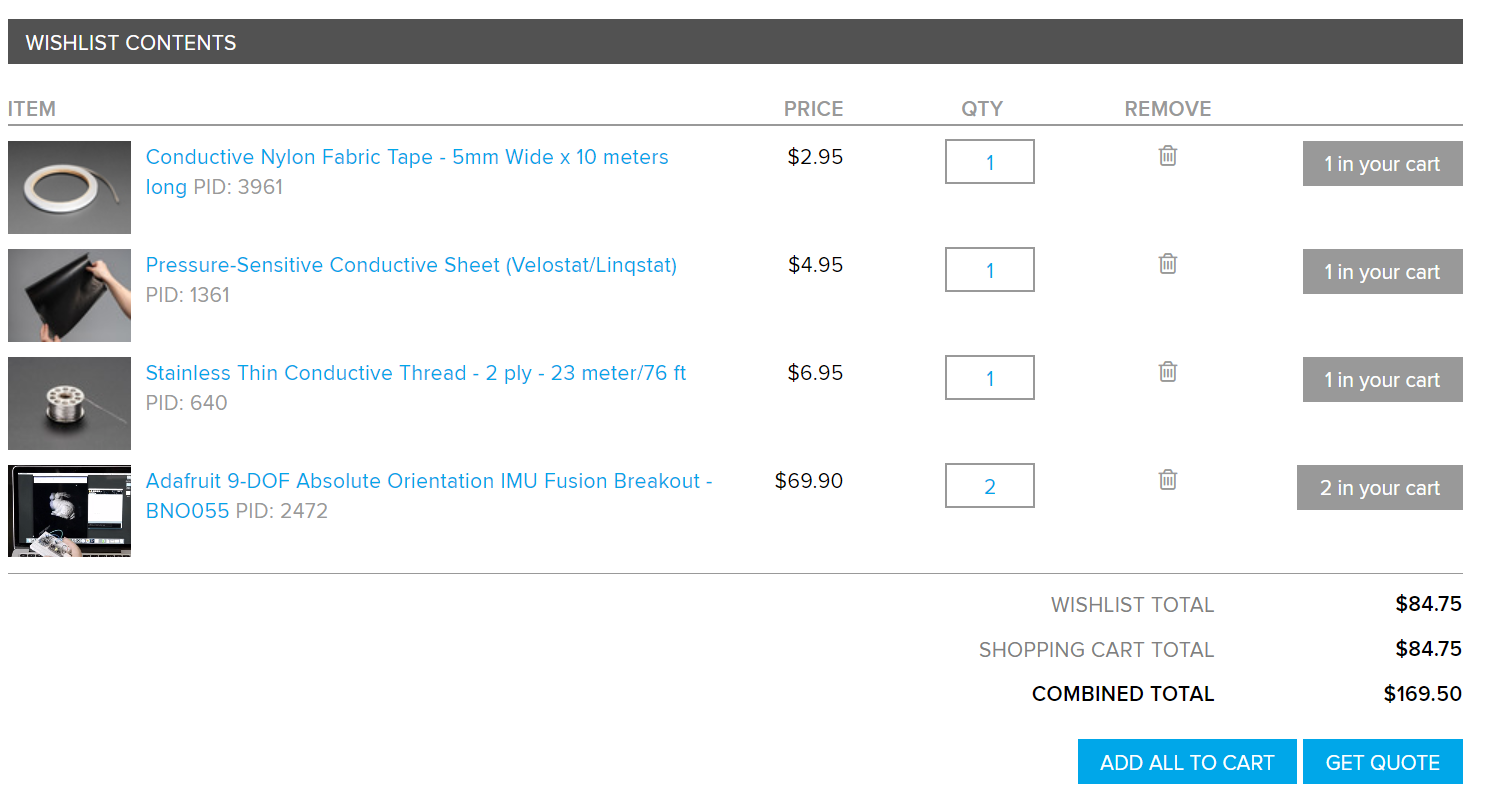
I was bored and I designed a new version of the pressure sensor and listed all of the parts from Adafruit. When I was done looking the price mouth wide open, I realized that the project might stop again. It would be really cool to finish this project and try it out in VR. I don't have the VR-gear too but that is a thing that I'll worry about after I've got these gloves done.
At the moment it looks like the pressure sensors are relatively cheap, so in theory I should get the pressure sensors a bit further in development. And then I could test them with the robot arm that I started to develop in this weekend.