

3D-tulostettava RC-Auto [*WIP]
*WIP = Work In Progress


Alkusanat
Tämä projekti on ollut jo varsin pitkään mielessä, mutta on kuitenkin vaativuutensa takia jäänyt taka-alalle monille tutun syyn takia. Viivyttely, paremmin tunnettuna procrastination [en.wikipedia.org] on erittäin vahvasti läsnä jokaisessa haastavassa projektissa, eikä tässäkään projektissa päästy välttymään siltä. Kuitenkin kun muistaa ottaa huomioon kaikki asiat mitä projektien varrella tulee opittua, on motivaatiota heti rutkasti enemmän. Monesti projektin aloittamiseen riittää katseen siirtäminen epäonnistumisista kohti uusia asioita ja oppimiskokemuksia, joita tulee vastaan projektin aikana.

Lisähuomio linkkeihin! Melkein jokainen linkki tällä sivulla on ns. affiliate -linkki, joka tarkoittaa sitä, että saan hyvin pienen summan kun ostat linkin kautta tuotteita kyseisiltä sivuilta! Jos siis haluat tukea sivustoa ja olet samalla ostamassa kyseistä tuotetta, niin ostamalla näiden linkkien kautta tuet samalla sivustoani maksamatta siitä ylimääräistä!
Projektin tavoite
Jokaisella projektilla on hyvä olla jokin tavoite. Myös aikarajan määrittäminen on tärkeää, sillä muutoin se tahtoo venyä loputtomiin, koska sen valmistumiselle määritettyä aikaa ei ole. Olen huomannut myös sen, että harrasteprojekteille on hyvä olla aluksi todella alhaiset tavoitteet, jotta sen saisi vauhtiin. Jostakin kummallisesta syystä Newtonin ensimmäinen laki tuntuu pätevän myös ajatustyöhön, jolloin projekti kannattaa vain aloittaa välittömästi, eikä jäädä pohtimaan sen aloittamista. Tällöin projekti on jo ns. vauhdissa ja sen tekeminen on huomattavasti helpompaa.
Kyseiselle projektille asetetut ensimmäiset tavoitteet:
- Saada aikaan eteenpäin liikkuva auto, joka kääntyy servomoottorilla.
Kuten huomaat, on tavoitteet asetettu tässä projektissa hyvin alas. On kuitenkin tärkeää, etteivät alhaiset tavoitteet jää ainoaksi tavoitteeksi kyseisessä projektissa. Tällöin tahtoo käydä se ilmiö, jossa kahdella renkaalla ja servolla varustettu pleksilevy, jota työnnät käsin eteen- ja taaksepäin, saavuttaa kaikki asettamasi tavoitteet ja jatkokehittäminen tuntuu olevan silkkaa ajanhukkaa. Asetetaan siis lopulliset tavoitteet projektille. Tässä on kuitenkin oltava tarkkana, ettei lopputulos tunnu liian vaikealta toteuttaa, samalla pitäen huolta siitä, että lopputulokseen päästessä on opittu edes hieman uusia asioita.
Kyseiselle projektille asetetut lopulliset tavoitteet:
- Ainakin 40 km/h vauhti (ohjattavuuden täytyy säilyä myös tässä nopeudessa)
- Auto liikkuu eteen- ja taaksepäin, kääntyy ja jarruttaa
Projektin eteneminen
Osien valitseminen
Ensimmäinen askel oli valita sopiva alusta ensimmäiselle versiolle. Valinta oli hyvin yksinkertainen, sillä hyllyssäni oli vain kaksi kappaletta Biltemasta muinoin ostamiani 300 mm x 300 mm x 6 mm muovilasilevyjä. Seuraavaksi tulostin kiinnikkeen takamoottoreille. Tässä versiossa on kaksi moottoria takana, jotka ovat suoraan kiinni renkaissa. Tämä tuntui olevan huomattavasti helpompi toteutus kuin kiinteän taka-akselin suunnitteleminen. Mutta tässä suunnittelussa on hyvä ottaa huomioon, että kaksi sensoroimatonta moottoria tulee pyörimään eri tahtiin, jolloin auto ei välttämättä kulje suoraan. Yksinkertaistetaan projektia kuitenkin näin alkuun käyttämällä kahta moottoria.
Seuraavana ongelmana on se, että hyllystä löytyy vain neljä kappaletta harjattomia lentokonemoottoreita. Kaksi on hyvin tunnettuja A2212 2200 kV moottoreita [eBay.com] (En suosittele missään nimessä muuhun kuin lentokonekäyttöön!) ja kaksi on vähän vähemmän tunnettuja Alomejor C4250 550 kV moottoreita [Amazon.de], jotka on suunniteltu pääasiassa longboardin sähköistämiseen. (C4250 -moottorin myyntipuheet on silkkaa huuhaata, mutta tuote tuntuu olevan silti ihan laadukas ja kohtuuhintainen sensoroimaton moottori.)Jotta projektista saataisiin vielä hieman haastavampi, on hyllyn pohjalla enää vain kaksi kappaletta HW30A Drone/Quadcopter ESC:iä [eBay.com]. Kyseiset escit on siis suunniteltu täysin lentokonekäyttöön, eikä niistä löydy esim. pakkia saati riittävää jännitteenkestoa 6S Li-Po akulle. Onneksi aikaisemmasta projektista jäi yksi 3S akku yli, joka toimii hyvin kyseisen esc:in kanssa.
Auton ohjaamiseen tarvitaan vielä ohjain, johon sijoitin onneksi jo jonkin aikaa sitten juuri tätä projektia pohtiessani. Flysky FS-I6 [Amazon.de] ei kuitenkaan ole suunniteltu RC-autoille, vaan lentokoneille, mutta halvan hinnan vuoksi päätin kuitenkin valita sen, ja kokeilla saako sitä toimimaan auton ohjaimena kohtalaisella vaivalla. Suosittelen myös samalla ostamaan ladattavia AA-paristoja! Niitä on helppo kierrättää laitteesta toiseen, ja akun loppuessa nakkaat ne laturiin, etkä ongelmajätteiden joukkoon!
Ai niin! Melkein unohdin servomoottorin! Näitäkin onneksi löytyy hyvin hyllystä! Kyseessä on siis MG996R -servomoottori [Amazon.de], josta löytyy uskomattoman paljon vääntöä ja hyvin nopeutta! Voin kyllä suositella ehdottomasti tätä servoa kaikkiin projekteihin, sillä hinta on mielestäni todella halpa, ja moottoreiden laatu ei petä! Jokaisen servon mukana tulee iso liuta lisäosia, kuten 'horneja' (kiinnitetään servon päähän), ruuveja ja jopa värinänvaimentimia! Tein aikaisemmin aika ison virheen käyttäessäni SG-09 servoja melkein jokaisessa projektissa, koska ajattelin, että ostin ne jo ja niitä olisi sama käyttää, ettei ns. "käytetty raha menisi hukkaan". Tosiasiassahan kyseinen summa on jo menetetty, eikä se tule takaisin, vaikka niitä kuinka käyttäisikin. Jos kyseinen asetelma tuntuu tutulta, niin se ei ole mikään ihme. Kyseessä on nimittäin 'sunk cost fallacy' (suomeksi uponneiden kustannusten harhakuvitelma), johon jokainen tulee törmäämään jossakin vaiheessa elämäänsä. Kyseinen ilmiö tarkoittaa siis sitä, että päätöksiä tehdään menneisyydessä tapahtuvien menetyksien perusteella, eikä sen perusteella, miten päätös vaikuttaisi tulevaisuuteen. Tästä ilmiöstä on hyvä olla tietoinen, jotta vastedes kun se tulee vastaan, et tuhlaa kaikkea aikaasi ja rahaasi. Suosittelen katsomaan Better Than Yesterday:n tekemän videon aiheesta, jos kyseinen ilmiö kiinnostaa. [YouTube.com]
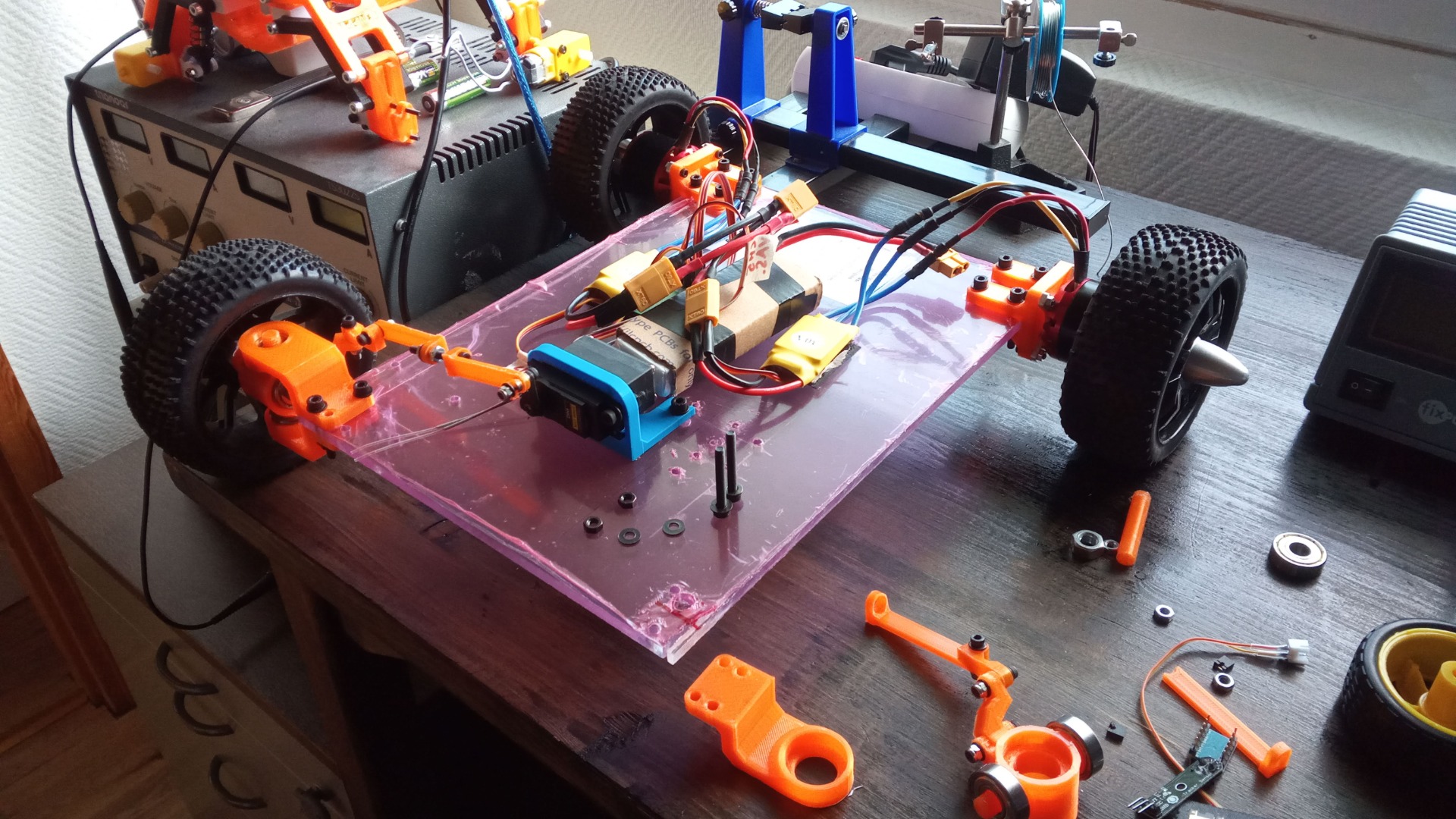
Ensimäinen versio
Hienoa! Nyt on osat kasassa ja pitäisi alkaa suunnittelemaan kiinnikeitä osille, jotta ne pysyisivät alustassa kiinni. (Ja kun nyt sitä kuitenkin mietit, niin ei, jeesusteippiä ei lasketa kiinnikkeeksi.) Onneksi nykyaikana on apuna 3d-tulostimet, jotka putkauttaa prototyyppien osat hetkessä ulos. Ultimaattisen laiskuuteni ansiosta Fusion 360:sta putkahti ulos noin viidessä minuutissa erittäin innovatiivinen 90° kulmapala, jossa on pari kiinnitysreikää pleksille ja moottorille.

Varoitus: turhaa teoriaa havaittavissa!
Kuitenkin kun sain kulmapalat ulos tulostimesta ja ajettua kahdella renkaalla hieman testiajoa, huomasin että ESC:it ottivat hieman turhan paljon lämpöä, ja vaihdoin saman sileän tien A2212 moottorit C4250 -moottoreihin. Tämä siis sen takia, että A2212:n kV -arvo on 2200, jolloin moottori on tarkoitettu pääsemään todella korkeisiin kierrosnopeuksiin pienelläkin akulla. (2S LiPo-akulla tämä tekee n. 16280 rpm nominaalijännitteellä laskettaessa.) Hiiliharjattomat moottorit ovat todella huonoja pienillä kierroksilla (varsinkin ilman sensoreita), ja aiheuttavat todella paljon rasitusta ja kuormaa, varsinkin kun välityssuhde on 1:1.
C4250 -moottoreissa kV-arvo on 550, jolloin se ei nouse niin suuriin kierroksiin (2S LiPo nominaalijännitteellä max. 4070 rpm.) ja vääntää paremmin alhaisilla kierroksilla. Myös moottorin suurempi halkaisija auttaa tuottamaan enemmän vääntöä, sillä voiman varsi on huomattavasti pitempi verrattuna pienempiin moottoreihin.
Toinen versio
Nyt kun moottorit on päätetty vaihtaa uusiin, on samalla suunniteltava uudet kiinnikeet, jotta ne saataisiin pysymään tukevasti kiinni muovilasissa. Muutaman iteraation jälkeen Fusionista putkahti ulos hyvin mielenkiintoisen näköinen osa. Ensimmäisellä kerralla en muistanut taaskaan, että pulteissa voisi olla kannat ja ne saattaisivat ottaa toisiinsa kiinni. Mutta meidän onneksemme 3d-tulostin pyöräyttää uudet osat käden käänteessä, eikä virheestä voi kuin ottaa opikseen! Mitä tein siis toisin? Siirsin pohjalevyä hieman alaspäin, ja mallinsin M3-ruuveille pienet upotukset, jotta ne eivät ottaisi kiinni M4-ruuveihin, jotka tulevat pleksilevyyn kiinni!


Huom! Jos haluat testata itse kyseisen proton rakentelemista ja parantelemista, tässä on linkki Fusion 360 -tiedostoon taka-akselin kiinnikkeeseen! [a360.co, Autodeskin oma jakoalusta Fusion -projekteille.] Huom! Kyseisestä linkistä saa myös ladattua STL-, STEP-, SketchUp, Inventor2019, jne. muodossa kyseisen osan! Paina vain oikeasta yläkulmasta Download ja valitse haluamasi tiedostomuoto!

Kaiken pahan alku ja juuri, eli kääntymismekanismi
Nyt kun voimansiirron ongelmat on selätetty, on aika keskittyä kääntymiseen. Tämä ominaisuus on oikeastaan kaiken pahan alku ja juuri, joka sai projektin alun venymään olettamuksella 'kääntyminen on todella vaikea toteuttaa'. Kuitenkin kun käytin asian Googlettamiseen n. 30 min aikaa, huomasin todella nopeasti, ettei kääntymismekanismit ole mitenkään kauhean monimutkaisia. Tästä oivalluksesta meni ehkä tunteroinen, kun toimiva malli olikin jo mallinnettuna. Ja taas päästiin toteamaan, että olisinpa tehnyt tämän aikaisemmin, kun eihän se ollutkaan niin vaikeaa. Monesti vain tahtoo olla niin, että lampaasta saa tehtyä ajatuksissaan suden, jolloin siihen ei huvita koskea pitkällä tikullakaan.

Huom! Jos haluat käydä ihmettelemässä 3d-mallia kääntymismekanismista, niin löydät ensimmäisen version tästä linkistä! Ota kuitenkin huomioon että kyseessä on ensimmäinen versio, ei lopullinen! [Fusion 360 shared project link, a360.co] Huom! Malli on jo muuttunnut seuraavaan iteraatioon!
Kuten kuvasta voi varsin hyvin huomata, ei kääntymismekanismi ole kauhean monimutkainen. Ainoana huonona puolena tästä suunnittelusta voin mainita sen kokoamisen hankaluuden. Yleensä tämänlaisessa kääntymismekanismissa käytetään pulttia, joka kulkee kokonaan ylhäältä alas asti. Suunnittelin kääntyvän osan kuitenkin niin, että siinä on 3d-tulostettavat kierteet ylä- ja alapuolella, joten kaikki osat pitää kiinnittää ns. yhtä aikaa, eikä kääntyvää osaa saa laitettua kiinni ilman koko systeemin purkamista. Seuraavassa versiossa pultin käyttäminen olisi ehdoton muutos, jonka tekisin. Olet varmasti huomannut myös mekanismin massiivisen koon suhteessa renkaan kokoon. Tämä johtuu siitä, ettei hyllystä löytynyt muita kuin 8 mm x 22 mm x 7 mm laakereita [Amazon.de] ja erittäin huonoja ja pieniä renkaita, jotka tulivat 3d-tulostetun mecanum-renkaisen robotin (aikaisempi projekti) moottoreiden mukana. Kyseisiä renkaita ja moottoreita kannattaa välttää kuin ruttoa tällaisissa projekteissa! (Jos et vieläkään usko varoitusta, niin syynä ovat siis heikot, huonosti suunitellut akselit, alennusvaihteiden heikkous ja moottorien tehottomuus. Toki kevyemmissä järjestelmissä ne voi toimia, mutta parempia vaihtoehtoja on pilvin pimein!)
Varoitus! Kaksi seuraavaa kappaletta sisältää suuren määrän punnintaa eri ESC:ien ja renkaiden välillä!
Ja takaisin aiheeseen. Seuraava vaihe olisikin siis ostaa uudet, isommat ja pitävämmät renkaat ja suunnitella kääntymismekanismi uusiksi. Myös eräs ongelma, jonka mainitsin pikaisesti aikaisemmin, eli pakin puute on yksi suurimmista ongelma, joka täytyy korjata. Koska tämänhetkiset ESC:it eivät kykene pakittamaan millään ilveellä, vaatii projekti uusien ESC:ien ostamisen. Olen yrittänyt verrata erilaisia versioita, jotka kykenisivät valjastamaan 6S-LiPo -akun jännitteen, jarruttamaan ja vieläpä vaihtamaan moottorin pyörimissuunnan tarvittaessa. Hobbylinnasta ostettaessa hintataso olisi ollut n. 150€ luokkaa per ESC (joita tarvii siis 2 kpl, eli yhteensä 300€), jossa ei ole mitään järkeä. Tuolla rahalla saisi jo ostettua kaksi ODRIVE V3.6 56V ohjainta! Jos ODRIVE ei ole tuttu, niin se on yksiä kehittyneimpiä moottorinohjaimia, joita tämänhetkisiltä markkinoilta löytyy. Ja kaiken lisäksi se kykenee ajamaan kahta moottoria yhtä aikaa, käyttämään erilaisia enkoodereita ja regeneroimaan jarrutusvirtaa! Mutta kuitenkin budjettini ollessa minimaalinen jää kyseiset herkut ostamatta ja siirtyy katse kohti eBay:n sivuja. Halvin ESC jonka löysin maksaa n. 15€ ja myyntipuheiden mukaan (joihin ei yleensä kannata liikaa luottaa), kykenee käsittelemään 6S LiPo-akun jännitteen. Tuotetiedoissa ei kuitenkaan mainita, että kykeneekö kyseinen ESC pakilla ajamiseen. Otsikossa kuitenkin hehkutetaan, että ESC sopii 1:8 RC-auton ohjaamiseen, joten tästä voisi kyllä olettaa, että sen 'pitäisi kyetä siihen'. Kyseinen ESC löytyy tästä linkistä, jos haluat käydä vilkaisemassa. Lopputuloksena voin sanoa, että jään kyllä miettimään vielä hetkeksi, onko 30€ kyseisien kiinanpalikoiden arvoista. ODRIVE:n 24V versio maksaisi kuitenkin vain 129,00€ ja sopisi myös tuleviin robottiprojekteihin. Vaikka tili olisikin tuon ostoksen jälkeen tyhjä, olisi kuitenkin hallussani robotiikkaprojekteihin sopiva moottorinohjain.
Vaikka äskeisestä kappaleestä jäi hyvin negatiivinen ilmapiiri leijailemaan, täytyy vielä pikaisesti mainita, että nykyiset renkaat ovat todella huonot. Pitoa ei tunnu olevan yhtään liikkeelle lähtiessä ja auto tuntuu 'puskevan' jokaisessa käännöksessä. Vertailun lopputulos on samaa luokkaa kuin ESC:ien kanssa, ja eBaysta löytyi 4 kpl 1:8 renkaita buggyyn. [Tässä taas linkkiä eBay.com:iin!] Ainoa asia mikä renkaissa hieman arveluttaa, on kumin materiaali. Materiaalin pitäisi olla todella pehmeää, jotta auto saisi mahdollisimman hyvän pidon myös kylmillä renkailla. 15€ on kuitenkin aika hyvä hinta neljästä renkaasta, joka saa taas pohtimaan, että missä sitä onkaan säästetty.
Jotta projekti ei kuitenkaan taas jäisi sutimaan paikoilleen kuten tämänhetkinen versio autosta, on johonkin pakko tehdä päivityksiä. Katsotaan kuitenkin kaksi pientä pätkää auton tämänhetkisestä liikkumisesta matolla ja lattialla, jotta saat hyvän kuvan sen tilanteesta. Pahoittelut jo valmiiksi huonosta laadusta.
Kuten videoilta käy hyvin ilmi, ajaminen hieman haasteellista pakin puuteellisuuden vuoksi, eikä pitoa oikein tahdo löytyä. Massan keskipiste on kuitenkin jo hyvin alhainen, joskin hieman liikaa takana. Todennäköisesti puskemista saisi hieman parannettua siirtämällä esim. elektroniikkaa ja servoa hieman eteenpäin.
Toinen ongelma joka käy ilmi videolla, on erittäin alkeellinen voimansiirto kääntymiselle. Tähän ongelmaan on onneksi helppo suunnitella uudet akselit, jotka välittää voiman järkevästi servolta renkaille. Kääntyvät osat täytyy toki suunnitella uusiksi, sillä niiden kiinnityspisteet olivat liian kaukana, eikä kääntyminen ollut tällöin riittävää. Laakerointi tulee myös (toivottavasti) samalla 3x6x2.5mm laakereiden avulla, joiden pitäisi riittää hyvin, mutta pieni koko tuo hieman haasteita tulostukselle.

Mutta nyt jotta projekti etenisi, niin laitan samantien uudet renkaat tilaukseen. Moottorinohjaimien tilannetta pitää vielä selvittää hieman enemmän, mutta pahoin pelkään ettei niitä saa ihan hetkessä, ainakaan halvalla. Valitettavasti kuitenkin taas vaihteeksi varusmiespalvelus painaa päälle, joka hidastaa projektin etenemistä hetkeksi, mutta ainakin gineksen jälkeen pitäisi uusien osien olla saapunut!
Kääntymismekanismin lopullisen version kehitys
Kääntymismekanismin kehitys on vieläkin kesken ja aika alkaa olla tiukilla. Yritän vielä saada tässä aamulla lopullisen version tulostettua ja testattua. Tämänhetkinen mekanismi toimii jo muuten, mutta säädettävä osa (jossa on poikittain oleva pultti) on vielä kehityksen alla. Kuvassa näkyy hieman liian lyhyet osat. Lisäsin 5 mm pituutta säädettävälle osalle, jolloin sen pitäisi sopia varsin mainiosti.


Kuvassa siis numeroituna uudet muutokset:
- Uusi kääntyvä osa, jossa kiinnike vaihdettavalle vipuvarrelle
- Vipuvarsi
- Apuinkki, jotta osat ei menisi solmuun
- Säädettävä voimansiirtovarsi, jolla saa muutettua renkaiden aurauskulmaa
Onnekseni sain ihan viimeisillä tunneilla kääntymismekanismin valmiiksi ja alta löytyy video sen toiminnasta. Tuo vaati kyllä yllättävän monta iteraatiota, eikä tuo ole vieläkään ihan täydellinen, mutta ainakin se toimii!
Uusien renkaiden sovittaminen
Viimeinkin taas lomilla ja renkaatkin ovat saapuneet Kiinasta. Harvinaista kyllä, mutta tällä kertaa kävi tuuri ja renkaat ovat lähes täydelliset! Kumin laatu on todella hyvä ja vanne on jykevää tekoa. Ainoa miinus on kumissa oleva kova kohta (todella pieni alue), joka johtunee pehmusteen huonosta asettelusta renkaan sisällä. Olen kyllä vahvasti sitä mieltä, että tuo ei tule vaikuttamaan ajoon juuri ollenkaan. Jos 110 mm renkaat kiinnostaa, niin tästä löytyy linkki eBay.com:iin!

Suunnittelin kiinnikeet uusiksi isommille renkaille, mutta parin testiajon ja auton hajoamisen jälkeen tulin siihen tulokseen, että 3D-tulostetut osat eivät välttämättä kestä moottorien tuottamaa tehoa. Pahimmalla koetuksella on ollut eturenkaiden kiinnitykseen käytettävät tapit. Viimeisellä testiajolla törmäsin kuitenkin vahingossa oman autoni renkaaseen, jolloin rc-häkkyrän vasemman eturenkaan kiinnikkeet suorastaan räjähtivät palasiksi.

Mainittakoon kuitenkin vielä jälkiviisautena, että jarrujen läsnäolo olisi voinut helpottaa hieman ajamista. Autosta lähtee nimittäin älytön määrä potkua, eivätkä edes uudet renkaat meinaa pysyä tien pinnassa kiinni.
Mutta nyt seuraavana yritän saada eturenkaiden kiinnityksestä kestävämmän (edelleen 3D-tulostamalla), sillä valitettavasti en omista työkaluja metallin työstämiselle.